System identification with toolbox
I use system identification toolbox in Matlab to achieve the parameters of the motor mode with the code of system identification .
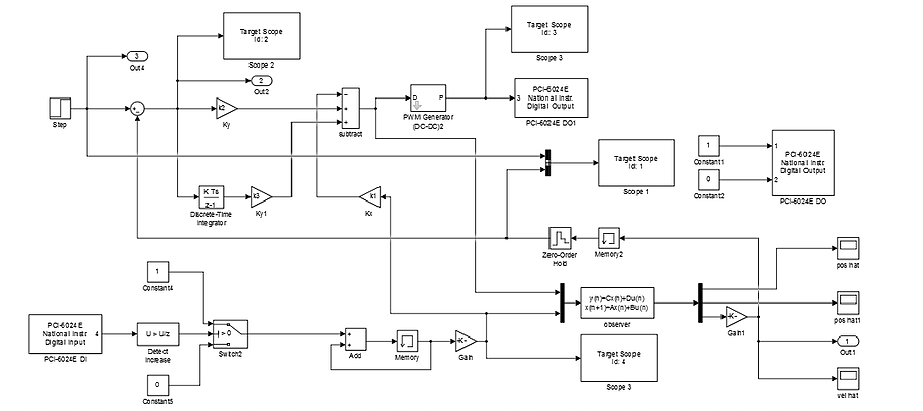
So I have the model parameters of the DC motor
\(A=\begin{bmatrix} 0 & 1 \\ 0 & -5.643 \end{bmatrix}\)
\(B=\left[ \begin{matrix} 0 \\ 50.83 \end{matrix} \right] \)
\(C=\left[ \begin{matrix} 1 & 0 \\ 0 & 1 \end{matrix} \right]\)
\(D=\left[ \begin{matrix} 0 \\ 0 \end{matrix} \right]\)
An alternative method is to use GUI system identification, You can read Matlab system identification toolbox to know more detail.
Until now I finish the system identification of the DC motor, and get the state-space to design the controller for next stage.